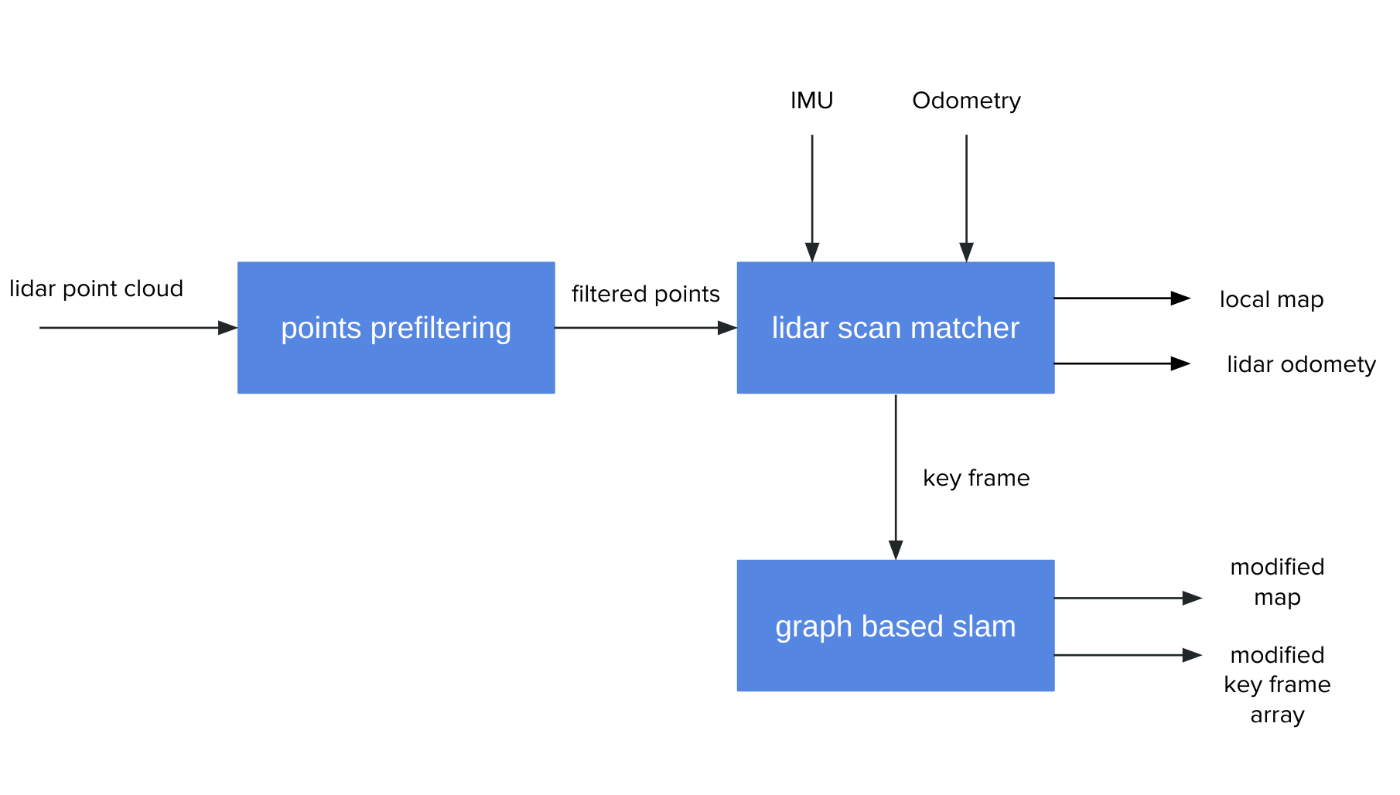
3D LiDARを用いたSLAMパッケージです。本パッケージはフロントエンド処理としてLiDARを用いたスキャンマッチングによるlidar odometry推定及び最適化候補となるキーフレームポーズ生成、バックエンド処理としてglobal map構築とループ検出及びポーズグラフ最適化による全体軌跡の修正を行っています。大まかなシステムとしては以下になります。
3D LiDARを用いたSLAMパッケージです。本パッケージはフロントエンド処理としてLiDARを用いたスキャンマッチングによるlidar odometry推定及び最適化候補となるキーフレームポーズ生成、バックエンド処理としてglobal map構築とループ検出及びポーズグラフ最適化による全体軌跡の修正を行っています。大まかなシステムとしては以下になります。